A stepper motor controller and method for controlling the motion of a stepper motor by selectively energizing the motor’s windings so that the current level in the windings match a desired current profile. The motor controller comprises a master logic device, preferably a microprocessor or microcontroller, which is programmed with logic for issuing control signals corresponding to the sequence with which the windings of the stepper motor are energized and the desired current profile.
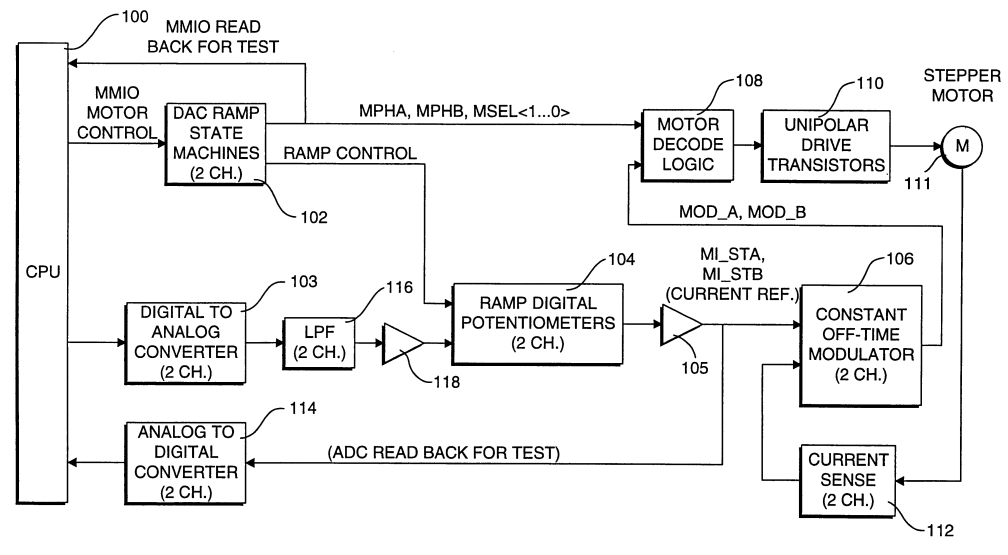
A portion of the control signals are received by a slaved logic device, which is programmed with logic for generating ramp command signals corresponding to the desired current profile. The slaved logic device produces a ramp command signal that is received by a digital potentiometer, which preferably includes an up/down counter. The output signal produced by the digital potentiometer corresponds to a current count value of the up/down counter, and it is controlled by the ramp command signals. By controlling the digital potentiometer with the ramp command signals, a current command signal is produced corresponding to the desired current profile and having a range between low and high reference voltages. This current command signal is provided to a stepper motor drive circuit, which controls the current levels in the stepper motor windings so that they correspond to the desired current profile and are phased according to required sequence.
This invention generally relates to a power source for a hybrid stepping motor, and more specifically, to a stepper motor having a power source that is digitally controlled to limit a slope of the power signal applied to the stepper motor.
BACKGROUND OF THE INVENTION
Stepper motors are well known in the art and are used in a wide variety of devices, including printers, disk drives, and other devices requiring precise positioning of an element. Stepper motors provide many advantages over other types of motors, most notably the ability to rotate through controlled angles of rotation, called steps, based on command pulses from a driver circuit. The accuracy of the stepped motion produced by a stepper motor is generally very good, since there is not a cumulative error from one step to another. The ability to incrementally rotate a shaft through a defined number of fixed steps enables stepper motors to be used with open-loop control schemes (i.e., applications in which a position feedback device such as an optical encoder or resolver is unnecessary), thereby simplifying the motion control system and reducing costs.
